|
18 |
過去記事の訂正 (7) |
MPF detectedへの変更の再計算した結果を表を用いてまとめます。
| (a)SPF | (b)SPF | (c)DPF | (d)DPF | |
|---|---|---|---|---|
| LAT2分離 | $(1-K_\text{IF,RF})\lambda_\text{IF}-(1-K_\text{IF,RF})\alpha$(1086.6) | $(1-K_\text{IF,RF})\alpha$ (1087.5) |
$K_\text{IF,RF}\alpha$(1088.6) | $K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}$ (1089.5) |
| SPF/DPF統合 | $(1-K_\text{IF,RF})\lambda_\text{IF}$ | $K_\text{IF,RF}\alpha+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}$ | ||
| 規格式1$\dagger\text{SM1}⇒\text{IF}$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha$ | |||
| 規格式3$\dagger$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta_\text{d}$ | |||
ただし、 $$ \begin{cases} \alpha:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ \beta_\text{d}:=\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right] \end{cases} $$ です。
$$ \begin{cases} \text{非冗長系の時は} & \color{red}{K_\text{IF,det}}=1\\ \text{冗長系の時は} & \color{red}{K_\text{IF,det}}=0,\ K_\text{IF,RF}=1 \end{cases} $$ 表1091.1に対して、非冗長系、冗長系のKパラメータを上記に示すとおり代入した表を表1091.2及び表1091.3に示します。
非冗長系
| (a)SPF | (b)SPF | (c)DPF | (d)DPF | |
|---|---|---|---|---|
| LAT2分離 | $(1-K_\text{IF,RF})\lambda_\text{IF}-(1-K_\text{IF,RF})\alpha$ | $(1-K_\text{IF,RF})\alpha$ | $K_\text{IF,RF}\alpha$ | $0$ |
| SPF/DPF統合 | $(1-K_\text{IF,RF})\lambda_\text{IF}$ | $K_\text{IF,RF}\alpha$ | ||
| 規格式1$\dagger\text{SM1}⇒\text{IF}$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha$ | |||
| 規格式3$\dagger$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha$ | |||
$$ M_\text{PMHF,NRD}=\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha}\\ =(1-K_\text{IF,RF})\lambda_\text{IF}+\frac{1}{2}K_\text{IF,RF}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right] \tag{1091.1} $$
冗長系
| (a)SPF | (b)SPF | (c)DPF | (d)DPF | |
|---|---|---|---|---|
| LAT2分離 | $0$ | $0$ | $\alpha$ | $\beta_\text{d}$ |
| SPF/DPF統合 | $0$ | $\alpha+\beta_\text{d}$ | ||
| 規格式1$\dagger$ | $\alpha$ | |||
| 規格式3$\dagger$ | $\alpha+\beta_\text{d}$ | |||
$$ \begin{eqnarray} M_\text{PMHF,RD}&=&\bbox[#ccffff,2pt]{\alpha+\beta_\text{d}}\\ &=&\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{SM,MPF})T_\text{lifetime}+K_\text{SM,MPF}\tau\right]\\ & &+\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(1-K_\text{IF,MPF})T_\text{lifetime}+K_\text{IF,MPF}\tau\right]\\ &=&\frac{1}{2}\lambda_\text{IF}\lambda_\text{SM}\left[(2-K_\text{SM,MPF}-K_\text{IF,MPF})T_\text{lifetime}+(K_\text{SM,MPF}+K_\text{IF,MPF})\tau\right] \end{eqnarray} \tag{1091.2} $$
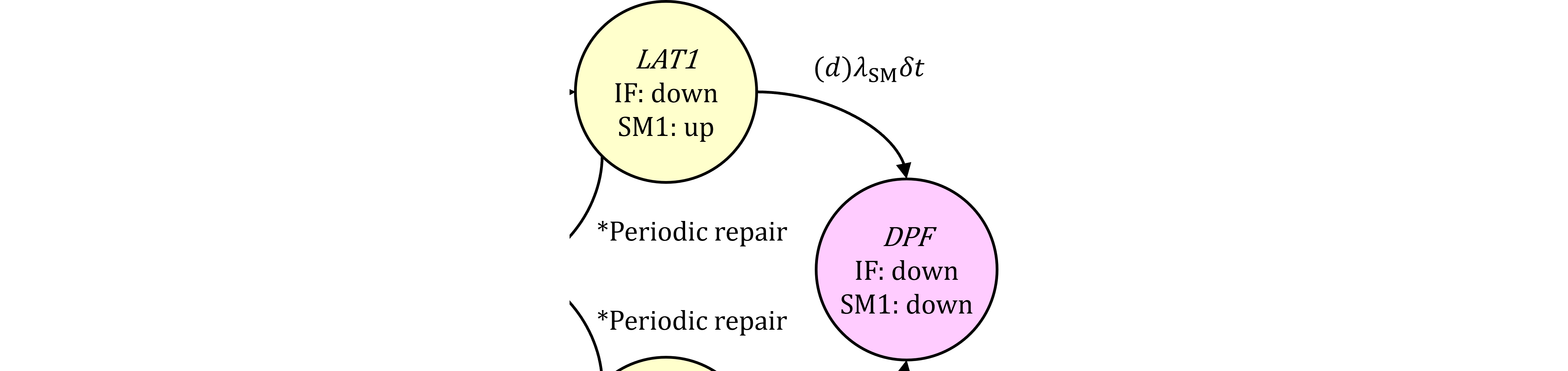
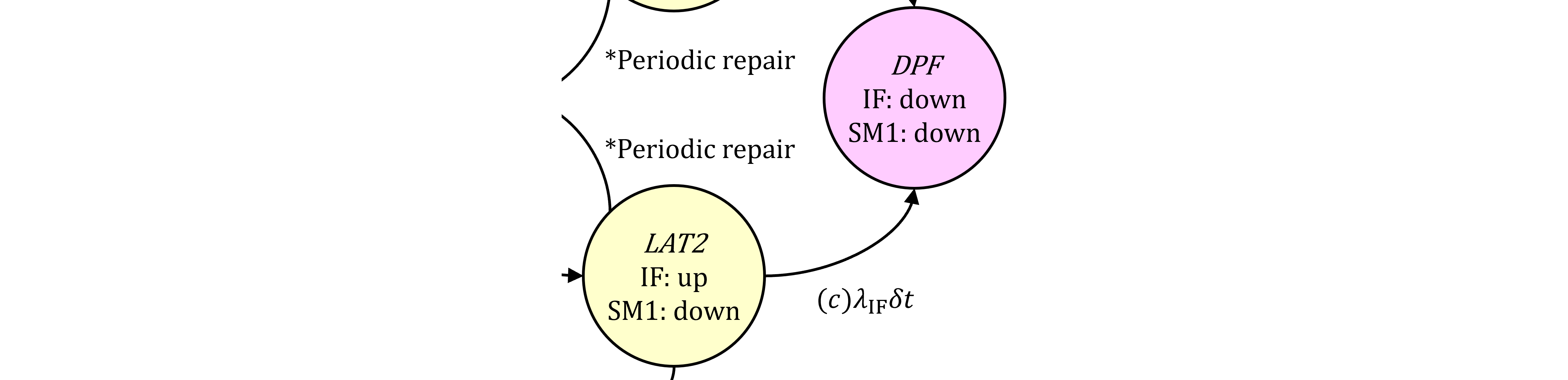
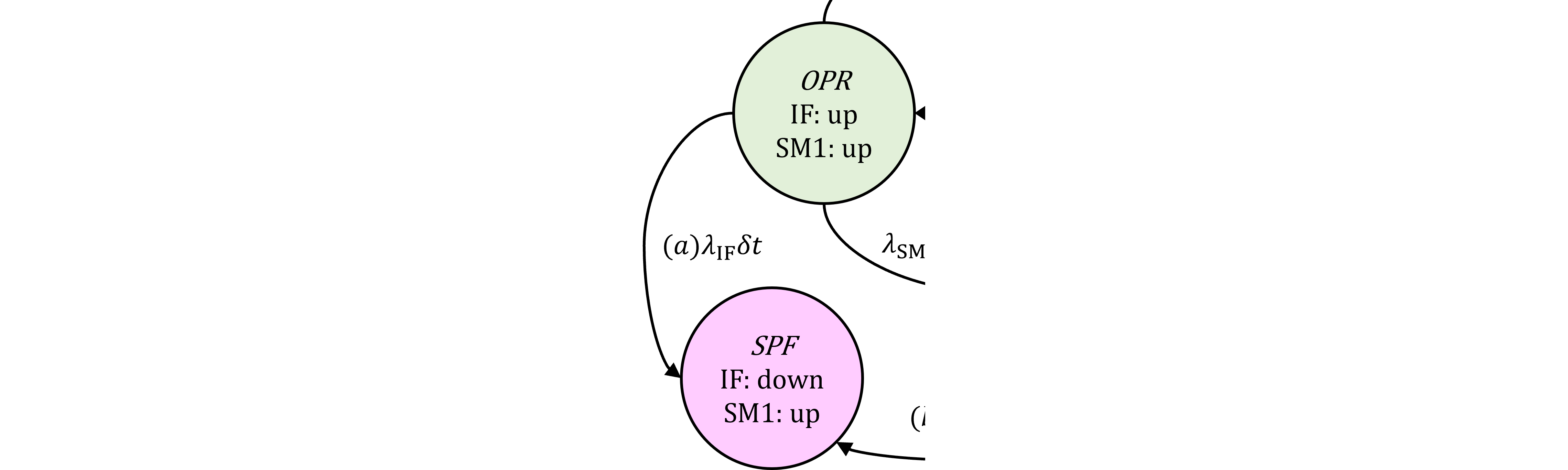
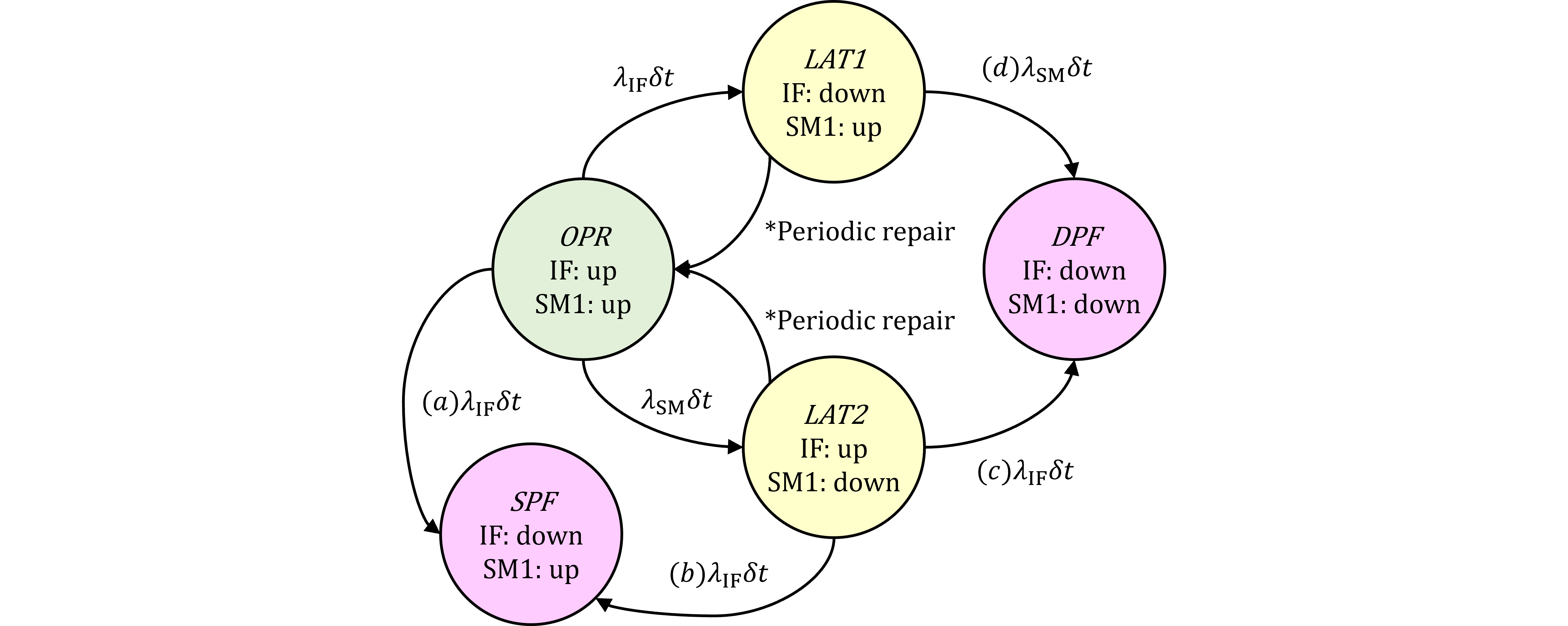
$\dagger$規格式1: 規格第1版 Part 10-8.3.3の第1式の条件。ブログの図367.1)において、IFが後にフォールトする場合=(a)SPF、(b)SPF及び(c)DPF。(d)DPFはSMが後にフォールトする場合なので対象外
$\dagger$規格式3: 規格第1版 Part 10-8.3.3の第3式の条件。ブログの図367.1)において、IF, SMのフォールトの順を問わない場合=(a)SPF、(b)SPF、(c)DPF及び(d)DPF。
従来記事では、冗長系の式を$2\beta$とし、$K_\text{IF,MPF}$と$K_\text{SM,MPF}$を合成した$K_\text{MPF}$を用いていました。しかし、正しくは、LAT2⇒DPF(c)ではSM側のMPF検出率$K_\text{SM,MPF}$が効き、LAT1⇒DPF(d)ではIF側のMPF検出率$K_\text{IF,MPF}$が効きます。したがって、冗長系のPMHFは$2\beta$ではなく$\alpha+\beta_\text{d}$となります。